Navit is a free and open-source car navigation that support for various vector map formats. Is written in C/C++ and can run on a wide range of machines, included Raspberry Pi.
Installation:
Before start the installation, be sure to have the GPS module connected and working on your Raspberry Pi (previous post).
- turn on the raspberry and open the terminal
- update with sudo apt-get update and sudo atp-get upgrade
- configure GPS listeners from boot: sudo nano /etc/rc.local
- copy those commands:
- sudo systemctl stop gpsd.socket
- sudo systemctl disable gpsd.socket
- sudo gpsd /dev/serial0 -F /var/run/gpsd.sock
- save and reboot
- open terminal and type: sudo apt-get install navit
- download a map (.bin), use Planet Extractor, quick and simple (you can use Garmin maps too)
- copy the map inside /home/pi/navit directory (you can rename it with a shorter name)
- navigate to /etc/navit
- open the navit.xml file: sudo nano navit.xml
- search for the line <mapset enabled=”yes”> … </mapset> and change yes to no
- now look for the line after: <!– Mapset template for openstreetmaps –>
- in the line after, set your map path instead of: “media/mmc2/Mapsnavit/osm_europe.bin”
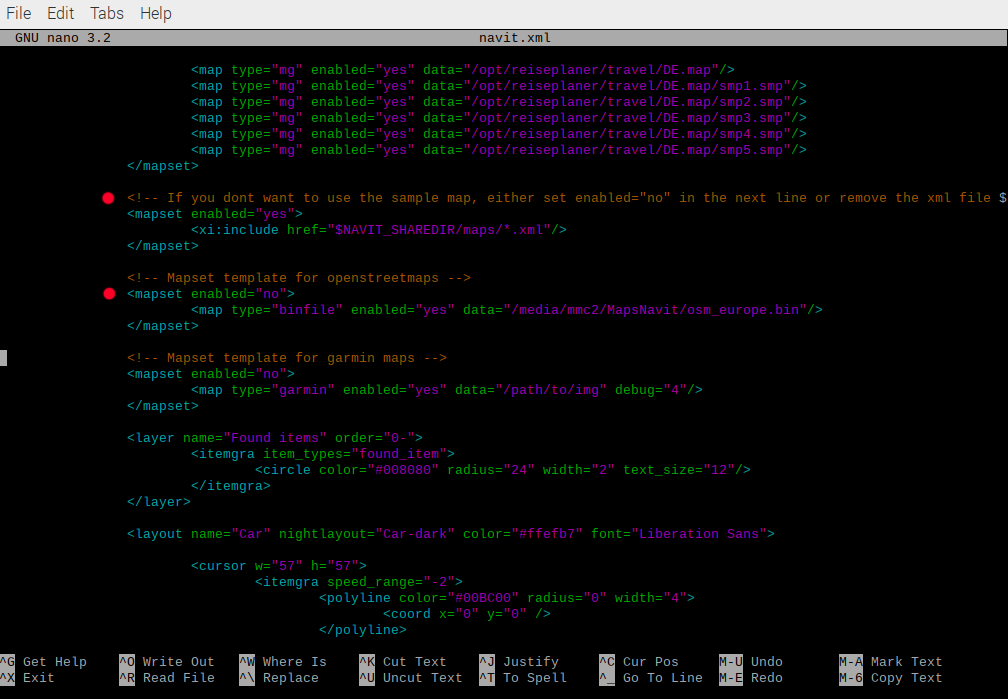
- save and close
- start Navit
More information about configurations can be found here: Navit Wiki